SIGN IN
THE CARLoS PROJECT
The CARLoS project aims to apply recent advances in cooperative mobile robotics, to a representative industrial scenario in shipyards. CARLoS robot will be built using off-the-shelf technology under a modular approach. The final prototype will be demonstrated as a robot co-worker for fit-out operations inside blocks of ship superstructures. Currently, there is no automated solution to these tasks.
Large semi-structured manufacturing spaces present serious challenges for robot mobility, safety and reliability. This is clearly the case of shipbuilding environments. Shipyards exhibit unique features that challenge but also make of major interest the deployment of mobile robots able to take on arduous repetitive tasks in which productivity may not be improved but at the expense of worker wages.
The problems at hand in CARLoS project are the fit-out operations inside blocks of ship superstructures. Currently, these tasks require arduous manual works. There is no available solution to automate the targeted works in a complex environment such as shipbuilding.
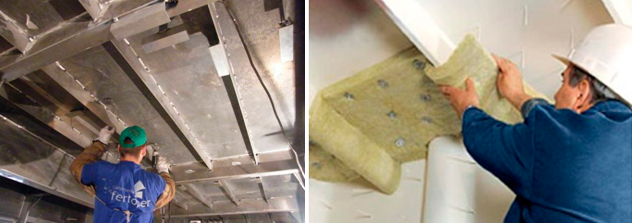
Manual stud welding for fit-out operations
The final goal of the CARLoS project is to get a prototype of a robot co-worker for fit-out operations inside blocks of ship superstructures. The specific operations targeted by CARLoS are stud welding and marking based on information from a CAD model that are necessary for posterior fit-out operations. This includes:
- Semiautonomous navigation inside ship blocks.
- Performing the necessary stud welding process completely automatic based on CAD descriptions.
- Marking pre-outfitting information from the CAD model onto bulkheads to aid fit-out operations by the human worker.
- Skills-based robot programming in order to be easily controlled by an ordinary shipyard worker.
FIRST 18 MONTHS PERIOD
You can learn more about the first 18 months period here.
FIRST 9 MONTHS PERIOD
During this first period, the specification of industrial and functional requirements has been done, and a 3D scenario was selected based on a real block of ship superstructure. The main components of the robot (i.e. platform, arm, sensors, and tools) have been selected, designed and assembled, and partially tested.
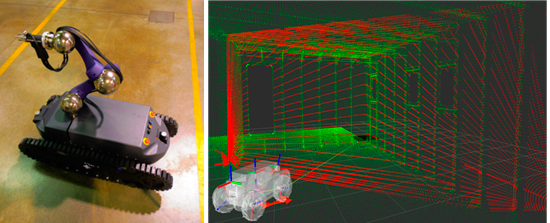
CARLoS Robot with the welding gun (left); Simulations on a 3D model of the block selected
Preliminary stud welding trials have shown positive results, using the selected manipulator and a commercial welding gun tailored to be attached to the wrist. Besides, specific requirements on process sensing (e.g. accurate orientation of the tool) have been assessed; confirming the adequacy of the components selected for sensing and process control.

Welding trials using the manipulator
The architecture and major components of the robot control software have been defined. Initial versions of software modules for autonomous robot navigation, bulkhead sensing, and process execution have been implemented.
A three layer architecture comprising of primitives, skills, and tasks has been adopted for more intuitive and safe robot programming for mobile manipulators.
An early mock-up of a user-interface has been realized. With the user-interface the operator will be able to connect to and configure the robot, get essential information about the status of the robot system, jog the mobile platform and robot arm around the workspace, and set up a skill sequence.
Besides, the preliminary software architecture for the HRI integration has been defined.
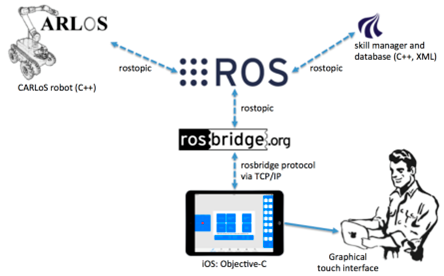
HRI software architecture
Laboratory trials and metrics for benchmarking have been defined at the main relevant component levels. Namely:
- The mobile robot platform for navigation and coarse positioning
- The manipulator and tool for fine positioning and process execution
- The human robot interaction system for cooperative robot operation and skills-based programming
Bulkhead samples to be used in trials have been designed based on real designs of a block of ship superstructure. Two samples will be built to be available for laboratory trials in the second year of the project.
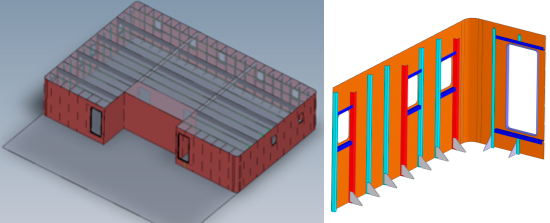
3D model of a real block (left) and Initial design of bulkhead for trials (right)
EXPECTED FINAL RESULTS AND POTENTIAL IMPACTS
CARLoS robot is expected to enable the automation of stud welding and marking in outfitting operations in shipbuilding, with an important increase of productivity, fault reduction, and competitiveness.
Besides, It will mean a step towards better (more reliable and agile) process management. In this regard, it will facilitate the implementation of innovative process management systems in shipbuilding and other sectors like industrial and civil construction based on metallic structures.
Otherwise, the CARLoS project is expected to contribute to strength the market position of European SMEs that develop, supply, and integrate mechatronic, sensing, and electronic technologies for industrial applications.
CARLoS is supported by the European Commission and puts together 4 SMEs and 3 RTD performers from 4 different countries..
![]()
The research leading to these results has received funding from the European Union Seventh Framework Programme (FP7/2012-2014) under grant agreement Nº 606363.